Raccolta di foto e video della mia famiglia e dintorni
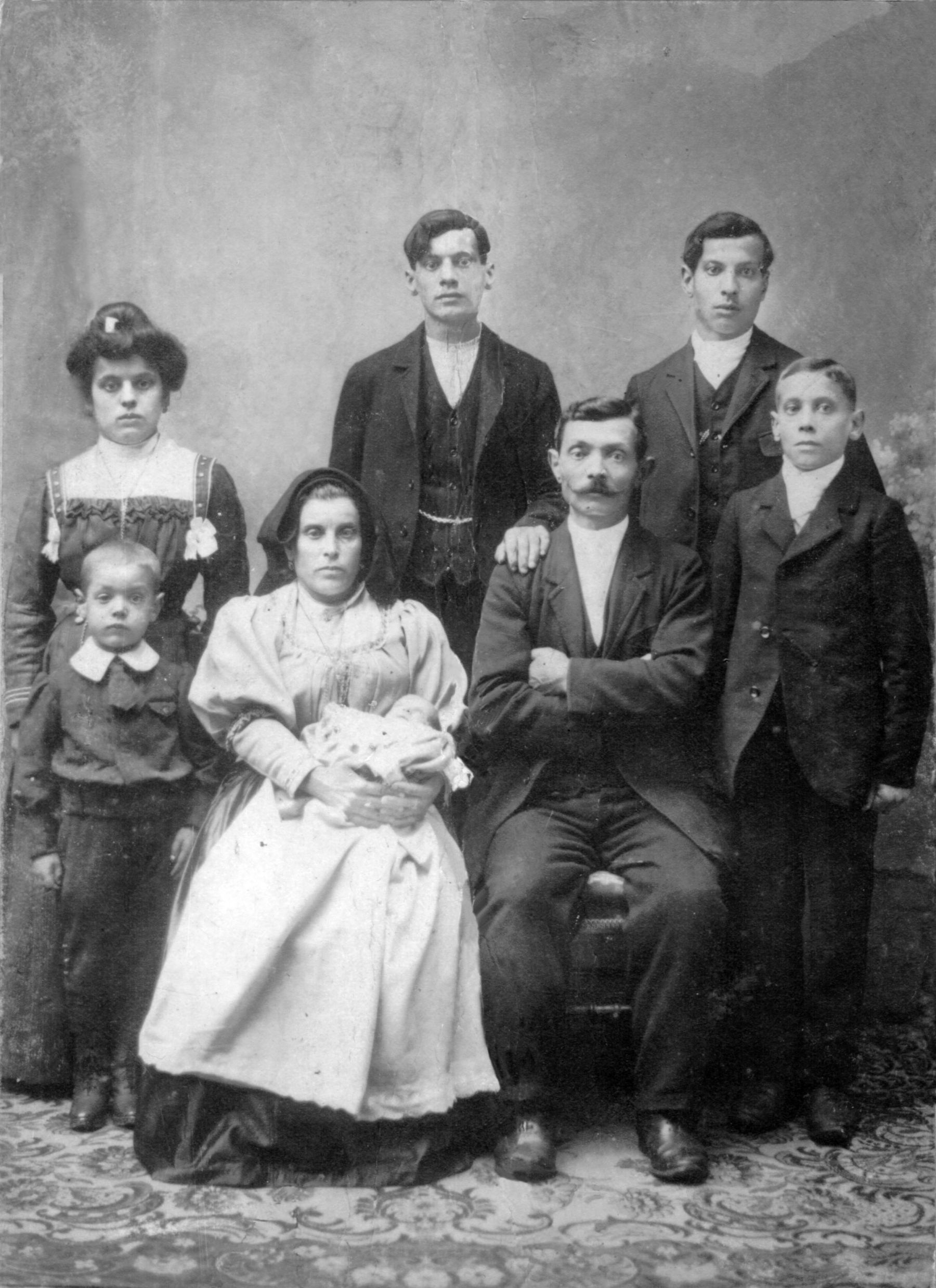
E' la foto di famiglia più antica che ho e ritrae al centro il mio bisnonno Loreto Tanzilli con la moglie Maria Di Ruzza. Il bimbo in basso a sinistra è
mio nonno Cesare Tanzilli
In piedi da sinistra Benedetta, Antonio e Raffaele Tanzilli
In basso da sinistra Cesare, Maria Di Ruzza con in braccio la piccola Carlina, Loreto e Luciano Tanzilli
I video in formato super 8 mm che sono riuscito a raccogliere, a convertire e inserire su YouTube

60 anni di Roberto Asquini
Festa di compleanno per i 60 anni di Roberto Asquini in Acme Systems a ladispoli il 5 agosto 2021